Micro Quad Copter X-Typeのフライトモデルの制作(その3)
苦節8ヶ月、ようやくここまでたどり着きました。そもそもMAX3421Eがこんなに扱いにくいものだったとは思っていなかった。今なら真っ先に候補から外して他の方法を考えると思いますね。
■届いた基板にパーツを実装してテスト中

単機能毎のテストについてはほぼ終了しました。あとは統合環境を作ってのテストになります。
カテゴリー : MQCX
苦節8ヶ月、ようやくここまでたどり着きました。そもそもMAX3421Eがこんなに扱いにくいものだったとは思っていなかった。今なら真っ先に候補から外して他の方法を考えると思いますね。
■届いた基板にパーツを実装してテスト中
単機能毎のテストについてはほぼ終了しました。あとは統合環境を作ってのテストになります。
ようやくここまで来ました。やっとフライトモデルのテスト基板が上がってきました。テスト機なので黄色にしてみたのですが。次回からは止めようと思います…。

早く実装したいのですが、明日はiPhone5sの発売日ですので組むのは今週末に組む予定です。自律系とLEDはセンサーテストのみとして手動で飛行できる状態になんとか来週中には組み上げたいと思います。まあ、最大の問題というか難問はそこから浮くかということなんです。さてさて、どうなることやら結末をお楽しみに。
ノイズでコントロールできなくなるとか、機体重量が大きすぎて浮かばないとか色々と考えられることは多いですね。
えーと、順調に遅れました…。先週頭に注文している予定だったのですが、部品配置と配線が終わらず結局一週間遅れです。
言い訳としては、10cm四方を5cm四方に入れるのは面積で4分の1になってしまいかなり大変である…。大変なんですよ~。回路変更した時の動作確認しながらだったので余計に時間がかかりました。
今回はなんだかんだで満足行く仕上がりになりました。現状で考えていた全部の機能を一枚の基板に入れることに成功しました。(以前はサブボード扱いにして載せ替え考えてました)
外部出力端子関係が若干オミットされてしまいましたがその辺りはおいおい考えながら追加していきたいと思います。重量かどのぐらいになるかな?
■回路構成

■配線イメージ
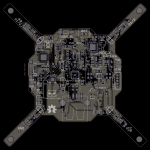
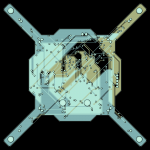
よく見ると、4層にしなくても良かったかもしれないと思われるぐらい中間層の配線が少ないことに気がつきました。もしかしたら2層でもいけるかもしれないので次回チャレンジしてみます。
とりあえずですが、テスト機のサイズを決定しました。イメージ図をCADで出しながらできるだけ基板面積が広く取れるように色々と調整してみました。結果、以前考えていた単純な四角形から八画形に変更したことで面積が増えました。以前の四角形で古い回路(部品点数多い)で部品実装可能だったので今回はMPU用のI2C変換+MPU6050とTLCのLED制御部分も搭載する方向で設計していきたいと思います。
■機体イメージ
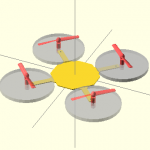
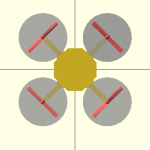
※:イメージの灰色部分はローター回転部分(110%)
試作3世代目の基板が上がって来ましたので実装しました。なんとか、ほぼすべての機能のテストと回路修正が終わりました(LED周りは面倒なので今回は実装せず)
■届いた基板(小さい方がAVR+MAXだけの基板で実装済み)

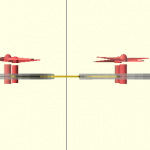
現状で、「Walkera QR Ladybird V2」のローターを流用する予定なのですが、出来ればオリジナルのローターを作りたいと思います。そこで、いい加減に使い慣れてきたOpenSCADで設計してみました。

普通に作ると芸がないのでプロペラに使う翼形はNACA4系の物を使えるようにしてみます。精度が必要だからFDM方式のプリンタでは無理でしょうね…。その辺りについてはおいおい考えていくということで、設計できるかどうかを試してみました。
ようやく、搭載予定のコンポーネントが分散した基盤上で動作するようになりましたので、次のステップとして部品点数を減らす手段を少し考えていきたいと思います。
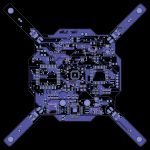
今回は、3世代目の全部載せ基盤を設計しましたが、クリスタルをセラロックに変更可能にしてみました。クリスタル回りで10個 => 3個になるのは魅力です。実機はMPU-6050&MAG-3110 => MPU-9150で6個の削減…。パスコンのサイズを0605 => 0403に変更して実装面積の削減を盛り込みたいのでその辺りのテストができるようにしてみます。
■基盤イメージ

他には、抵抗を集合抵抗に変更するとかですかね?
ようやく、MAX3421EをATMega1284Pに認識させることに成功しました。やっぱり、デザインルールですねおそらくは、ピッチを詰めすぎたのが敗因だと思われますのでデザインの方法というかを今後は変えていく方向で考えていきたいと思います。今回作成した基板はATMega1284P+MAX3421EとMultiWiiにモータードライバを積んだテスト基板です。デジタルコンパスはいままで「HMC5883L」を使用していたのですが、今回は「MAG3110」もしくはデジタルコンパス「AK8975」を内蔵したMPU-9150を搭載してテストしてみました。

結論から言いまして、相性的な問題かもしれませんが実機は「MAG3110」 or 「MPU-9150」にする予定です。おそらくは部品点数を減らせるワンチップ9軸「MPU-9150」でテストボードを作っていきます。
2枚目のテスト基板なのですが、案の定というかUSBがうまく認識してもらえませんでした。もう、何が原因なんでしょうか…。デザインルールの問題の様な気がしてきましたので若干ルールの方を緩くして作り直してみようともいます。部分的にショートしているのが原因でないかとチョット予想してみたのですが、多分そうだと思う。
■失敗基板とかテスト基板とか

何とか修正するべく再度USB周りだけの基板を作ってみました。今度は、MAX3421E+ATMえが1284Pの複合基板です。これが動かなければ基本設計から見直しをしないといけないレベルなので何とか動く様になって欲しいです。MAX3421単体の基板では動作することを確認しているのでATMega1284Pとの組み合わせ部分で問題が発生、もしくは基板自体の精度の問題のどちらかだと思うのですけれど…。
やっと、全部入りテストボードを組み上げました。途中で、Sanguinoのテストボードとかにうつつを抜かしていたのでチョット時間がかかってしまいました。現状でシリアル変換チップが正常に動作することを確認して今日は終了です。ファームを入れて動作確認は何とか今週中に終わりたいですね。
