ESP-WROOM-32開発ボード+microSDでSDカードを読む
お問い合わせをいただいたりしましたので、SDカードの読み取りについて書いておこうと思います。さてさて「ESP-WROOM-32開発ボード+microSD」ではSDカードを6bitのHS2を使って接続を行っています。そして、SDカードの認識というか仕様には2種類ありましてArduinoで一般的に使われているSPIモードとは接続方法が違っています。

SPIモード
* DATA3/SS
* CMD/MOSI
* CLK/SCK
* DATA0/MISO
★HSモード(ESP-WROOM-32開発ボード+microSDで使用)
* DATA0/D2
* DATA1/D4
* DATA2/D12
* DATA3/D13
* CMD/D15
* CLK/D14
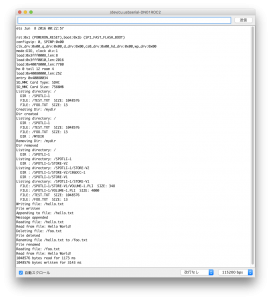
■認識時のコンソール画面
■使用するコード(SDMMC_Test)
[cpp]
/*
* Connect the SD card to the following pins:
*
* SD Card | ESP32
* D2 12
* D3 13
* CMD 15
* VSS GND
* VDD 3.3V
* CLK 14
* VSS GND
* D0 2 (add 1K pull up after flashing)
* D1 4
*/
#include "FS.h"
#include "SD_MMC.h"
void listDir(fs::FS &fs, const char * dirname, uint8_t levels){
Serial.printf("Listing directory: %s\n", dirname);
File root = fs.open(dirname);
if(!root){
Serial.println("Failed to open directory");
return;
}
if(!root.isDirectory()){
Serial.println("Not a directory");
return;
}
File file = root.openNextFile();
while(file){
if(file.isDirectory()){
Serial.print(" DIR : ");
Serial.println(file.name());
if(levels){
listDir(fs, file.name(), levels -1);
}
} else {
Serial.print(" FILE: ");
Serial.print(file.name());
Serial.print(" SIZE: ");
Serial.println(file.size());
}
file = root.openNextFile();
}
}
void createDir(fs::FS &fs, const char * path){
Serial.printf("Creating Dir: %s\n", path);
if(fs.mkdir(path)){
Serial.println("Dir created");
} else {
Serial.println("mkdir failed");
}
}
void removeDir(fs::FS &fs, const char * path){
Serial.printf("Removing Dir: %s\n", path);
if(fs.rmdir(path)){
Serial.println("Dir removed");
} else {
Serial.println("rmdir failed");
}
}
void readFile(fs::FS &fs, const char * path){
Serial.printf("Reading file: %s\n", path);
File file = fs.open(path);
if(!file){
Serial.println("Failed to open file for reading");
return;
}
Serial.print("Read from file: ");
while(file.available()){
Serial.write(file.read());
}
}
void writeFile(fs::FS &fs, const char * path, const char * message){
Serial.printf("Writing file: %s\n", path);
File file = fs.open(path, FILE_WRITE);
if(!file){
Serial.println("Failed to open file for writing");
return;
}
if(file.print(message)){
Serial.println("File written");
} else {
Serial.println("Write failed");
}
}
void appendFile(fs::FS &fs, const char * path, const char * message){
Serial.printf("Appending to file: %s\n", path);
File file = fs.open(path, FILE_APPEND);
if(!file){
Serial.println("Failed to open file for appending");
return;
}
if(file.print(message)){
Serial.println("Message appended");
} else {
Serial.println("Append failed");
}
}
void renameFile(fs::FS &fs, const char * path1, const char * path2){
Serial.printf("Renaming file %s to %s\n", path1, path2);
if (fs.rename(path1, path2)) {
Serial.println("File renamed");
} else {
Serial.println("Rename failed");
}
}
void deleteFile(fs::FS &fs, const char * path){
Serial.printf("Deleting file: %s\n", path);
if(fs.remove(path)){
Serial.println("File deleted");
} else {
Serial.println("Delete failed");
}
}
void testFileIO(fs::FS &fs, const char * path){
File file = fs.open(path);
static uint8_t buf[512];
size_t len = 0;
uint32_t start = millis();
uint32_t end = start;
if(file){
len = file.size();
size_t flen = len;
start = millis();
while(len){
size_t toRead = len;
if(toRead > 512){
toRead = 512;
}
file.read(buf, toRead);
len -= toRead;
}
end = millis() – start;
Serial.printf("%u bytes read for %u ms\n", flen, end);
file.close();
} else {
Serial.println("Failed to open file for reading");
}
file = fs.open(path, FILE_WRITE);
if(!file){
Serial.println("Failed to open file for writing");
return;
}
size_t i;
start = millis();
for(i=0; i<2048; i++){
file.write(buf, 512);
}
end = millis() – start;
Serial.printf("%u bytes written for %u ms\n", 2048 * 512, end);
file.close();
}
void setup(){
Serial.begin(115200);
if(!SD_MMC.begin()){
Serial.println("Card Mount Failed");
return;
}
uint8_t cardType = SD_MMC.cardType();
if(cardType == CARD_NONE){
Serial.println("No SD_MMC card attached");
return;
}
Serial.print("SD_MMC Card Type: ");
if(cardType == CARD_MMC){
Serial.println("MMC");
} else if(cardType == CARD_SD){
Serial.println("SDSC");
} else if(cardType == CARD_SDHC){
Serial.println("SDHC");
} else {
Serial.println("UNKNOWN");
}
uint64_t cardSize = SD_MMC.cardSize() / (1024 * 1024);
Serial.printf("SD_MMC Card Size: %lluMB\n", cardSize);
listDir(SD_MMC, "/", 0);
createDir(SD_MMC, "/mydir");
listDir(SD_MMC, "/", 0);
removeDir(SD_MMC, "/mydir");
listDir(SD_MMC, "/", 2);
writeFile(SD_MMC, "/hello.txt", "Hello ");
appendFile(SD_MMC, "/hello.txt", "World!\n");
readFile(SD_MMC, "/hello.txt");
deleteFile(SD_MMC, "/foo.txt");
renameFile(SD_MMC, "/hello.txt", "/foo.txt");
readFile(SD_MMC, "/foo.txt");
testFileIO(SD_MMC, "/test.txt");
}
void loop(){
}
[/cpp]
はじめまして通称HIDEと名乗っています。
色んなところで「BLDCコントローラー」で検索すると、必ずこのサイトが出てきます。
今、ホームページに有るプレジャーボート用のアンカーウインチを製作販売してるのですが、
現在使用のモーターはDC12Vのブラシモーターです。
ハウジングに永久磁石の付いたこのモーターはフリー回転(電力を流して回転では無い)では
この磁石が邪魔してスムーズな回転ではありません。
それで、磁石の付いていないBLDCを使いたいのですが、結線もコントローラーの設定も何も
分かりません。それと、中国製でBLDCを探したのですが、DC24Vが最低の電圧でDC12Vが
有りません。
で、使うモーターはDC24V/400W定格21.5Aです。これをバッテリー1個のDC12Vで動かせるように
するか(有れば教えて下さい)バッテリー2個(直列と並列を切り換える装置は作れそうです)
にするかです。
※オルタネーターが12Vなので、充電しながら使えるのがベストです。
弱小企業ですので、高額の顧問料は支払えません。ですが、無料で教えてもらおうとは思って
居ませんので、お考えの程をお知らせ頂けるとありがたいです。
返答は此処のコメント欄でも直メでも構いません。
メールにて回答させていただきました。