Orca 0.42のX/Y軸ステッピングモーター交換
物はあったのですが踏ん切りがつかなかったせいで交換していなかったステッピングモーターを交換(ステップ角1.8度⇒0.9度)することにします。
今回使ったのはオリエンタルモーター「PK245MD15B」をX/Y軸に使ってみることにします。(ダンパーが必要ない場合には「PK245MD15A」になります) Z軸は現状で特に問題ないのと既にSTEPS_PER_UNITが1000を超えている状態なので交換を見送りました。

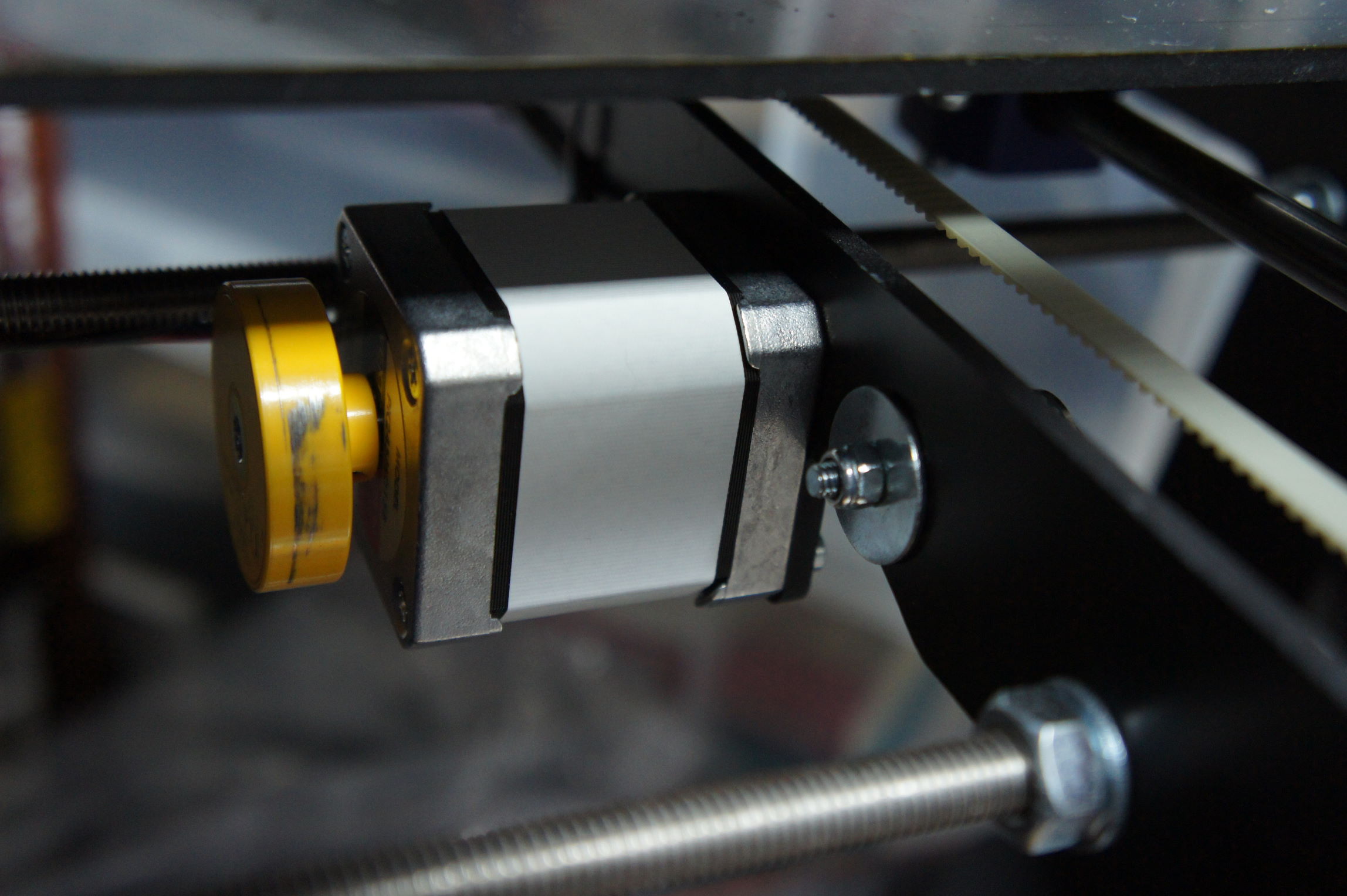
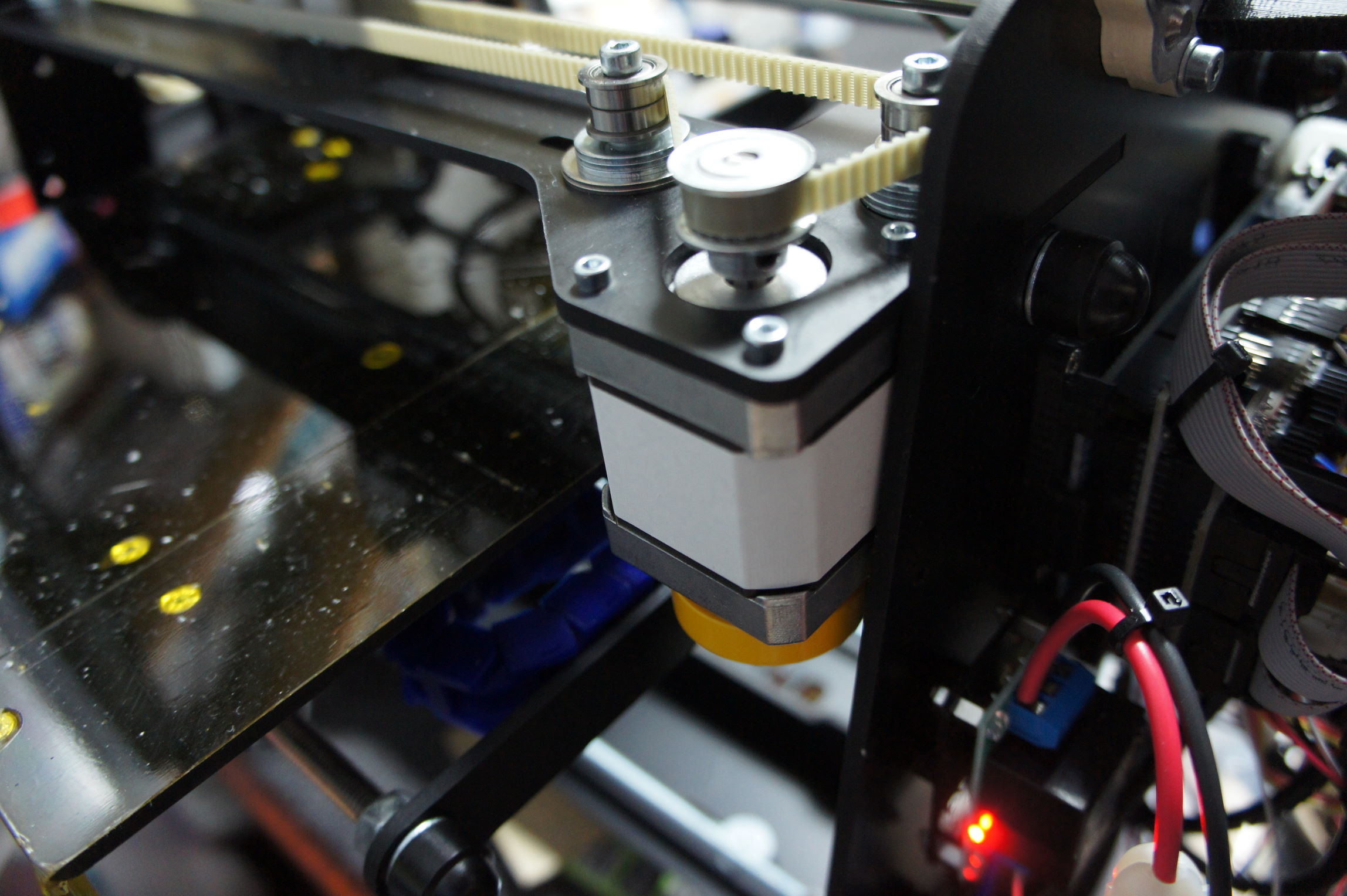
■左側が「PK245MD15B」右側が「SY42STH47-1684B」
サイズがNEMA17で同一なのでボルトオンで交換可能です。 Y軸側の配線長が足りなかったので延長したぐらいで交換作業は終了です。
交換してみての第一印象は非常に動作音が静かになりました。ほとんど聞こえない、たぶん人間の耳には…。
それに合わせて、DEFAULT_AXIS_STEPS_PER_UNITの調整が必要になりますので値を修正します。
#define DEFAULT_AXIS_STEPS_PER_UNIT {128, 128, 1920, 325}
※:Arduino Mega+RAMPS1.4(1/16 Step)& V10b/Orca0.42 +X/Y(StepAngle 0.9)
どのぐらい精度が上がったかは以下の画像で見てもらえばわかると思いますが、どうでしょう?
左が1.8度、右が0.9度ですけがほとんど差はない様に思われます、ダンパーを付けたときの改善の方がよっぽど大きいと思います。

コメントはまだありません。