Micro Quad Copter X-Typeの機体サイズ
とりあえずですが、テスト機のサイズを決定しました。イメージ図をCADで出しながらできるだけ基板面積が広く取れるように色々と調整してみました。結果、以前考えていた単純な四角形から八画形に変更したことで面積が増えました。以前の四角形で古い回路(部品点数多い)で部品実装可能だったので今回はMPU用のI2C変換+MPU6050とTLCのLED制御部分も搭載する方向で設計していきたいと思います。
■機体イメージ
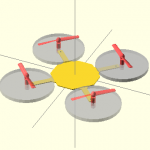
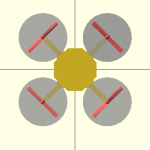
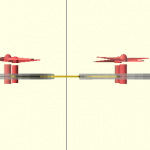
- 形状:X形状クアッドモーター
- フレーム:1.6mm厚PCB
- 回路基板ベースサイズ:53mmx53mm(最大)/49mmx49mm(最小)
- アーム幅:6mm
- モーター間隔:79.5mm(対角112.5mm)
- ローターサイズ:55mm
- 最大機体サイズ:167.5mm(ローター回転径含む)
- 最大重量:不明
※:イメージの灰色部分はローター回転部分(110%)
ローターサイズを考えるとこれ以上間隔詰めるのはよくなさそうですし詰めるとしてもあと5mm程度が限界になってしまいそうな予感。あまり詰め過ぎるとコントロール不能になってしまうと思うんですよ、構造的な問題で…。
そして、機体サイズですが、後々の拡張を考えるとできるだけ大きいベースがほしいところです。でも、機体重量を考えるとできるかぎり小さくしたいところです。この辺りはかなり悩めます。アームも強度を考えると太くしたいのですが太くし過ぎるとローターの風を遮ってしまうという問題がありますしね。(イメージは47.5mm最大、アーム5mm)

1号機は完全なテスト機扱いになってしまいそうですが、なんとかめどが立ってよかったです。来週中に注文、来週中に基板注文!!(重要なので2回書きました)
コメントはまだありません。