Micro Quad Copter X-Typeのフライトモデルの制作(その22)
どうにも納得がいかないので、推力テスト用の治具を作って再度推力を測定してみました。結果、搭載バッテリーを使って1基で18gとなりました。4基合計推力が72gとなると飛ぶはずなんですがどうして飛ばないの??基板側で何らかの電流量制限に当たっている線が濃厚になってきました。

カテゴリー : MQCX
どうにも納得がいかないので、推力テスト用の治具を作って再度推力を測定してみました。結果、搭載バッテリーを使って1基で18gとなりました。4基合計推力が72gとなると飛ぶはずなんですがどうして飛ばないの??基板側で何らかの電流量制限に当たっている線が濃厚になってきました。
最近、クアッド関係の更新がなかなかできなかったのは原因がわからない迷宮にちょっとハマり込んでいたからです。
かなり悩みましたがだいたい原因がわかってきたのです。
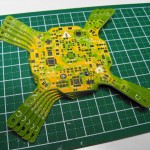
■4号機写真

4号機は全部入りでα版を兼ねるべくして作成していたのですが、写真のようにすべて搭載すると飛ばない…。それはもう、床を這うようにしか飛ばない。 単純に考えて推力不足なのですが、モーター&ローター単体で20g以上のテストデータがあるので機体側の問題だと考えて色々と修正したりテストしていました。
基板パターンに関しては4層基板の内層は17umということを忘れてパターン引いてしまったので一部当てはまるのですが、それ以外はテストも問題なし。 最後の最後で、機体搭載時条件(バッテリ駆動)での推力を測ったらローター1基あたり12-13gの推力でしたと…。記録を読んだらテストした時には単体で定電圧電源から5V入力していました。非接触回転計まで買ってテストしましたよ…。
先月末に発注していました4号機の基板が到着して実装&テストしました。ここまで来るのに1年かかるとは全く考えていませんでしたが、ようやくすべての回路を載せた機体が完成しました。
ここからの予定ですが、冗長になっている部品の削除&確認と不要と思われる部分の削除&確認をして配布用のβ機の設計をします。(追加したバッテリ電圧確認用の回路、なんでこんな面倒なことをしたのかが不明。シンプルに変更予定)機体重量に関してですが、部品の軽量化で-3gの全備重量38gを予定しています。(テスト配布用機体は最大5機用意する予定)
MultiWiiの設定に手こずっていますが来週中ぐらいで何とかしたと思っています。
飛んでるところは誰かの手を借りないと無理なのでもう少しお待ちください。

PCB_Frame = 10.4-10.5g(7.8g)
BluetoothDongle =1.7-1.8g
USB(TypeA)Connect = 2.0-2.1g
上記実装済み重量=>14.2g
Motor + propeller = 15.4g(3.8-3.9g x4)
Mounter = 2.8g(0.7g x4)
Lipo Battery = 9.5g(400mAh)
Total = 41.9g




超小型の国産クアッドコプターを電波法の柵を回避して自作するべく作っているMQCXですが、4号機(α機)の基板は先週に発注しました。今回も懲りずにFusion PCBに注文、またどっか行ったりしなければ来週中には届くはずです。現状ですが、とりあえず3号機は飛ぶ状態にはなったのですが、モーターマウンタとかローターガードとかがほしい状態。ローター何枚か割ってしまいました…。
そんな前置きで、今回もOpenSCADでローターガード付きのマウンタとかローターガードとか色々と設計してみました。
■ローターガード一体型のモーターマウンタ


■ローターガード単体でスナップオンタイプ


ローターガード一体型のマウンタはFDM機では出力できないですね。まあ、理想で作りました。スナップオンタイプのローターガードは出力できる形状を目指して頑張ってみました。
続きを読む
まずは、ついに(ようやく)3号機が初飛行に成功しました。そして、実装&飛行して回路側に修正が必要な部分と部品配置に問題がある部分が分かったのでPCBを修正しました。本来であれば、コード修正を先に行うべきなのですがPCBは注文してから手元に届くまでに2週間程度が必要なので手順を逆にしています。注文してからゆっくりコードいじったりモーターマウンタの再設計をしたいです。実際は、パターンカットとか色々やりながら3-2号機を完成させるよりも4号機を設計しなおした方が早いとの判断でした。途中経過の3号機を複数作っても部品代の無駄ですし。
さてさて、予定では4号機を作ってからα版(人柱版)を作る予定だったのです。
ですが、基板を修正してみたところ大きな修正箇所はなさそうな気配なので4号機=α版として作っていこうと思います。


そうは言ったものの、結局のところ結構修正しました…。
・MAX3421Eリセット回路修正
・コンデンサ位置修正(USB-Aコネクタと干渉のため)
・間違ってLED配線を貫いたVia位置修正
・MPU-6150/MAG3110のI2C配線修正
・FCU/MPU近くにコンデンサを追加
・バッテリ電圧測定用の回路を追加(ノーコン対策)
・MAG3110の向き修正(電源ライン取り回しのため)
・USB電源ライン用ジャンパ追加(FCU)
・電源パターンを再度見直し
最後の最後までMAX3421Eに苦しめられている感じです。毎回の回路修正がデフォルトですがこれで終わって欲しい…。
ついに、製作を始めてから1年かかって初飛行に成功しました。動画撮りたかったのだけど一人じゃ無理でした。初飛行時の重量は約41g、目標の40グラムをちょっと出てしまいました…。バッテリの電流量の絡みで最後の最後でバッテリを1つ大きいのに変えたのが重量増の原因…。Bluetooth用のType-Aコネクタを軽い物に変えれば1g軽くなるのは分かっているのですが変更は悩み中。データシートがない怪しい部品なんです。
■初飛行後の機体とPS3コントローラー

★現在の仕様
MPU/FCU:Atmega128P/32u4(Arduino)
USB-Control:MAX3421E
LED-Control:TLC5940(RGB-LEDx4/LEDx4)
プロペラ直径:55mm
プロペラ間距離:85mm(最小)/120mm(対角)
機体重量:41g
そろそろ、作り始めてから1年ぐらいが経過してしまっています。それでもなかなか思ったようにいっていないのですが、3号機の単体テストが終わりそうです。あとはモーター積んで飛ぶか飛ばないかといったところです。ファームの書き込みがうまくいったりいかなかったりでチョット原因不明気味なところがあるのですがとりあえずの形には出来そうです。

だいぶサボっていますけどチョットずつは進んでいます。とりあえず、今回新しくしたところの検証は終わりました。一番の心配だったAtmega32u4ですが、セラロックでもUSBをちゃんと使うことが出来て一安心です。ロジック変換の接続をチョット失敗したので空中配線ふたたびな予感ですけど…。フライトモデルを作っていこうとしたら、チップを使い切ってしまったので注文中です。届き次第フライトモデル(3機目)を作っていきたいと思います。
■テスト中風景

基板行方不明事件の結果、再注文していた基板が出来てきました。これでようやく2ヶ月近く休止状態になっていたいろいろが動き始める予定です。ハンダ付けの腕前が落ちてると実装出来なそうなピッチなのですが…。これがちゃんと動いてくれればいいのですがFCUのチップ変更しているのでそのあたりの問題が出そうな予感がします。

基板が再注文になってしまったので、せっかくなのでちょっと修正しました。裏面にRGB_LEDを載せていたのですが、バッテリを搭載するとちょうど隠れてしまいそうな位置にあったので前から気になっていました。この際なので通常のLEDにしてアーム部分の裏面に位置と種類を変更してみました。これで再注文予定です。1月半ばには今度こそ出来てくるはずです。
