Orca 0.42完成でいいのかな…。
制御系を「Generation 6 Electronics」⇒「Arduino MEGA/RAMPS」に変更してステップモードを1/16に変更しました。
モーター音がかなり静かになりましたのでこの変更はかなりお勧めです。
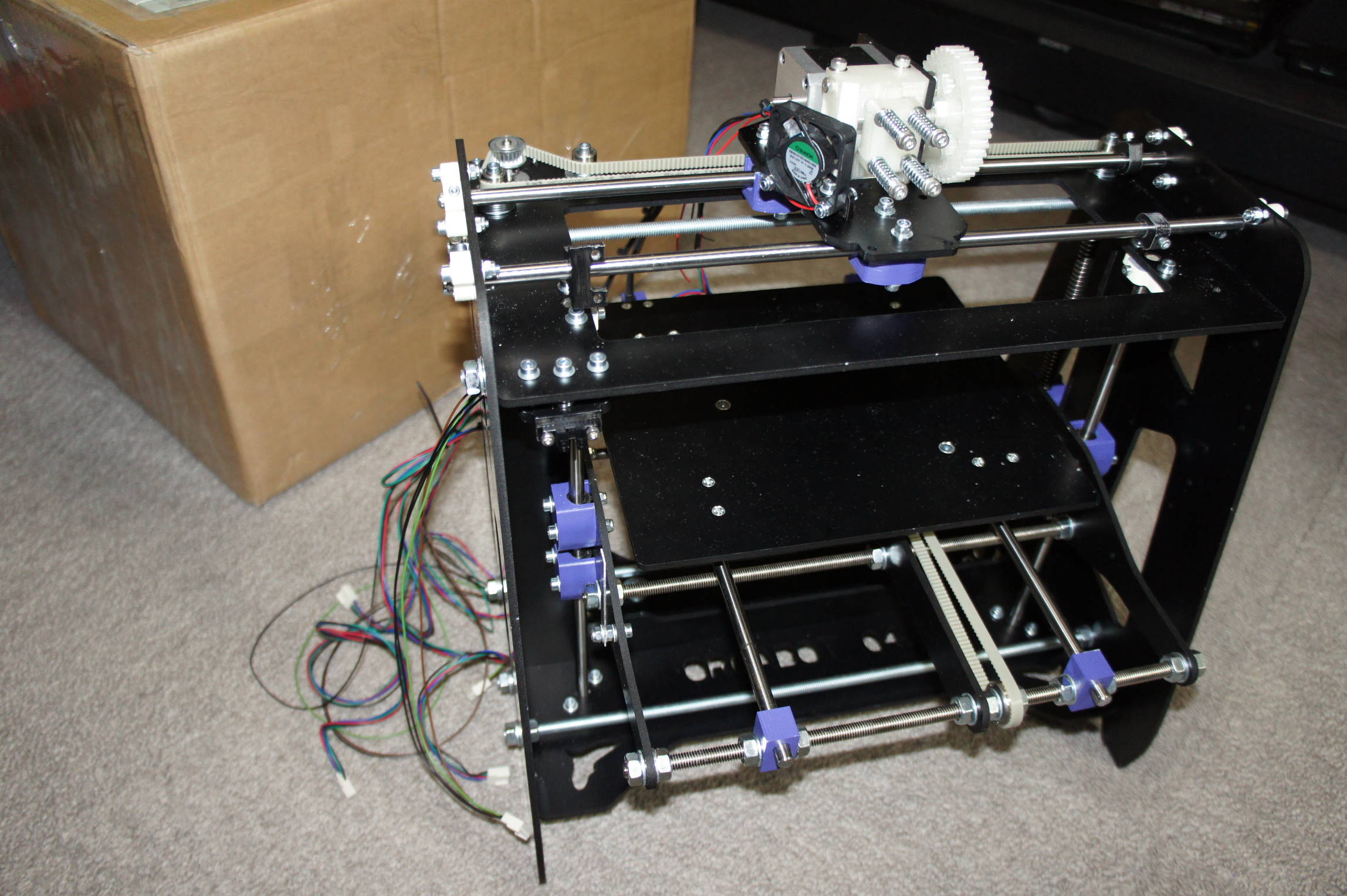
本体への取り付け用の台座は初めて3D-CADソフトを使って自分で設計しました!
それから、ファームは上がったばかりの「Marlin_RC3」を入れてみました。設定情報は適当に計算して入力…。

ちなみに、エンドストップがそのままでは使えないので途中で変換用の基盤を作って変換しています。(もしかすると、ファーム側で吸収できたかもしれない…)