Micro Quad Copter X-Typeのフライトモデルの制作(その20)
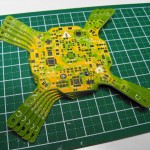
先月末に発注していました4号機の基板が到着して実装&テストしました。ここまで来るのに1年かかるとは全く考えていませんでしたが、ようやくすべての回路を載せた機体が完成しました。
ここからの予定ですが、冗長になっている部品の削除&確認と不要と思われる部分の削除&確認をして配布用のβ機の設計をします。(追加したバッテリ電圧確認用の回路、なんでこんな面倒なことをしたのかが不明。シンプルに変更予定)機体重量に関してですが、部品の軽量化で-3gの全備重量38gを予定しています。(テスト配布用機体は最大5機用意する予定)
MultiWiiの設定に手こずっていますが来週中ぐらいで何とかしたと思っています。
飛んでるところは誰かの手を借りないと無理なのでもう少しお待ちください。

■現在のコンポーネント重量(4号機/α版)
PCB_Frame = 10.4-10.5g(7.8g)
BluetoothDongle =1.7-1.8g
USB(TypeA)Connect = 2.0-2.1g
上記実装済み重量=>14.2g
Motor + propeller = 15.4g(3.8-3.9g x4)
Mounter = 2.8g(0.7g x4)
Lipo Battery = 9.5g(400mAh)
Total = 41.9g