ブラシレスジンバルコントローラー(その3)
テスト用に基板作ったのですが、ほしい方いらっしゃいますかね…。ヒューズ入っているのでそんなに大電流は流せません(4A)けど、そこそこ使えるはずです。モーターを用意してうまく重心位置を調整してあげればそこそこ使えると思います。正規品は3万円台ですけど、この基板ならばモータ込みで8千円位+フレームで作れるはずです。(シルクをプラスマイナス逆にしてしまったミスが有りますがそのぐらいです。)
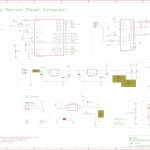
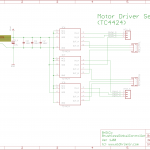
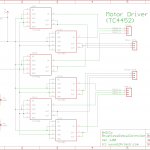
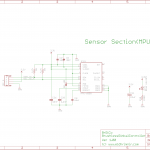
■回路図
■部品リスト
★MFT2014に持って行くだけ持って行っているので、気になる人は声かけて下さいませ。
















