魔法の大鍋
The Magic Cauldron is presented by Wordpress.
カテゴリー : 電子工作
3DプリンタをWindows7(64bit)で使用する接続環境の作成
Reprapはオープンソースですのでソフトも組み合わせが無数にある中から必要な物を選ぶ必要があります。
このあたりは、ネット上に情報があふれているので特に問題ないと思うのですが…。(溢れすぎていて問題がありますね)
現状で正常に動作する組み合わせを念の為に記載しておこうと思います。
なんというか、忘却録というか、バックアップですね。
Orca 0.42 全体/各部写真
情報が不足している面もありますので各部写真を撮ってアップしておきたいと思います。
改造後なので一部参考にならない部分もありますけどそれはご勘弁下さい…。(特に電気系)
写真をいっぱいアップしていますので見たい人は開いてください。
Orca 0.42でのテストプリント
こちらのサイトを見ると、Mndelmaxで色々とテストプリントをされています。
Orcaを使ってプリントするとどの程度の結果となるのか見てみたかったので同じものをプリントしてみたいと思います。
形状が複雑な方が良いので「Sappho’s Head (slic3r friendly included)」をプリントしました。(印刷時間は8時間少々)



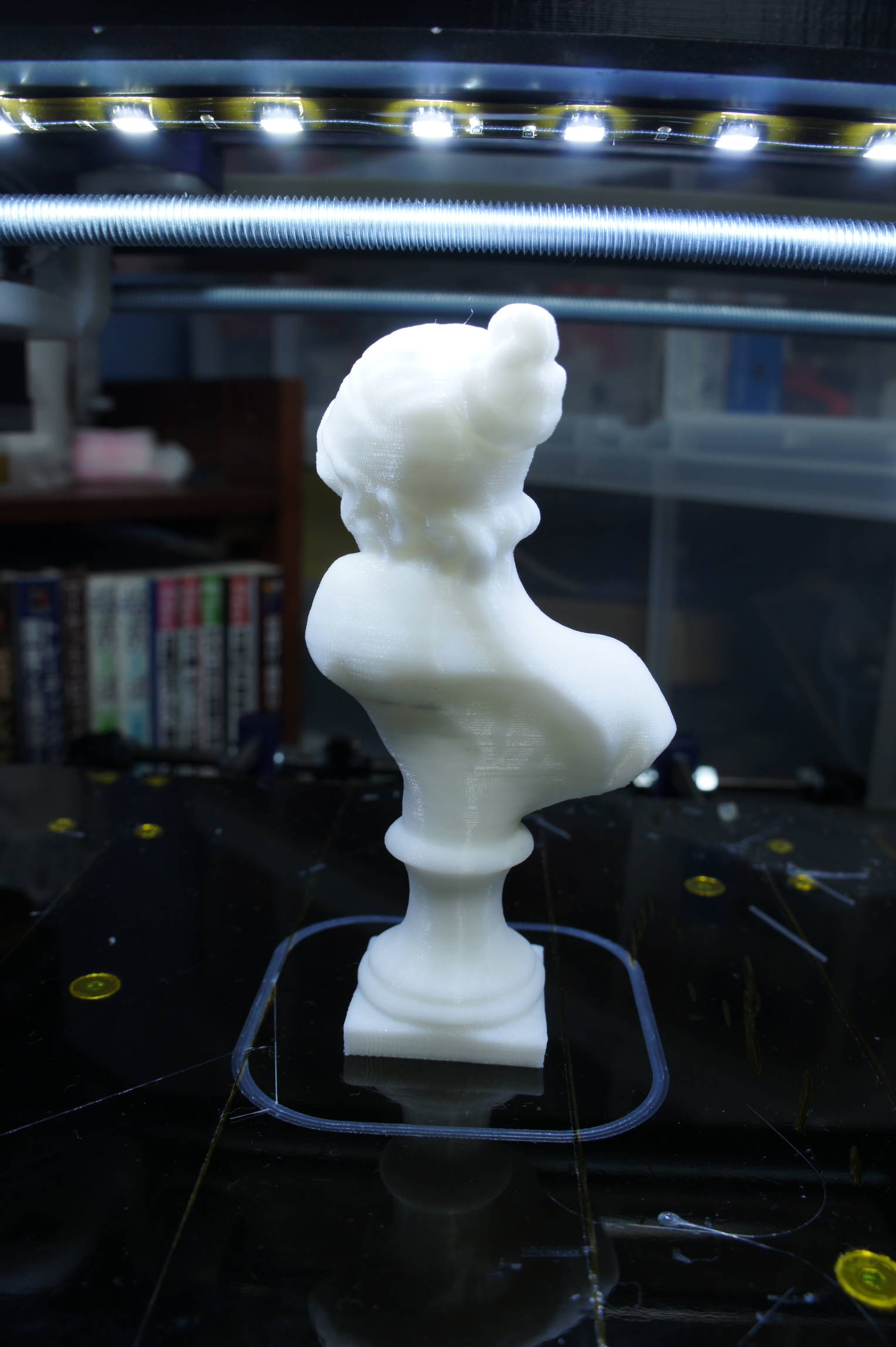

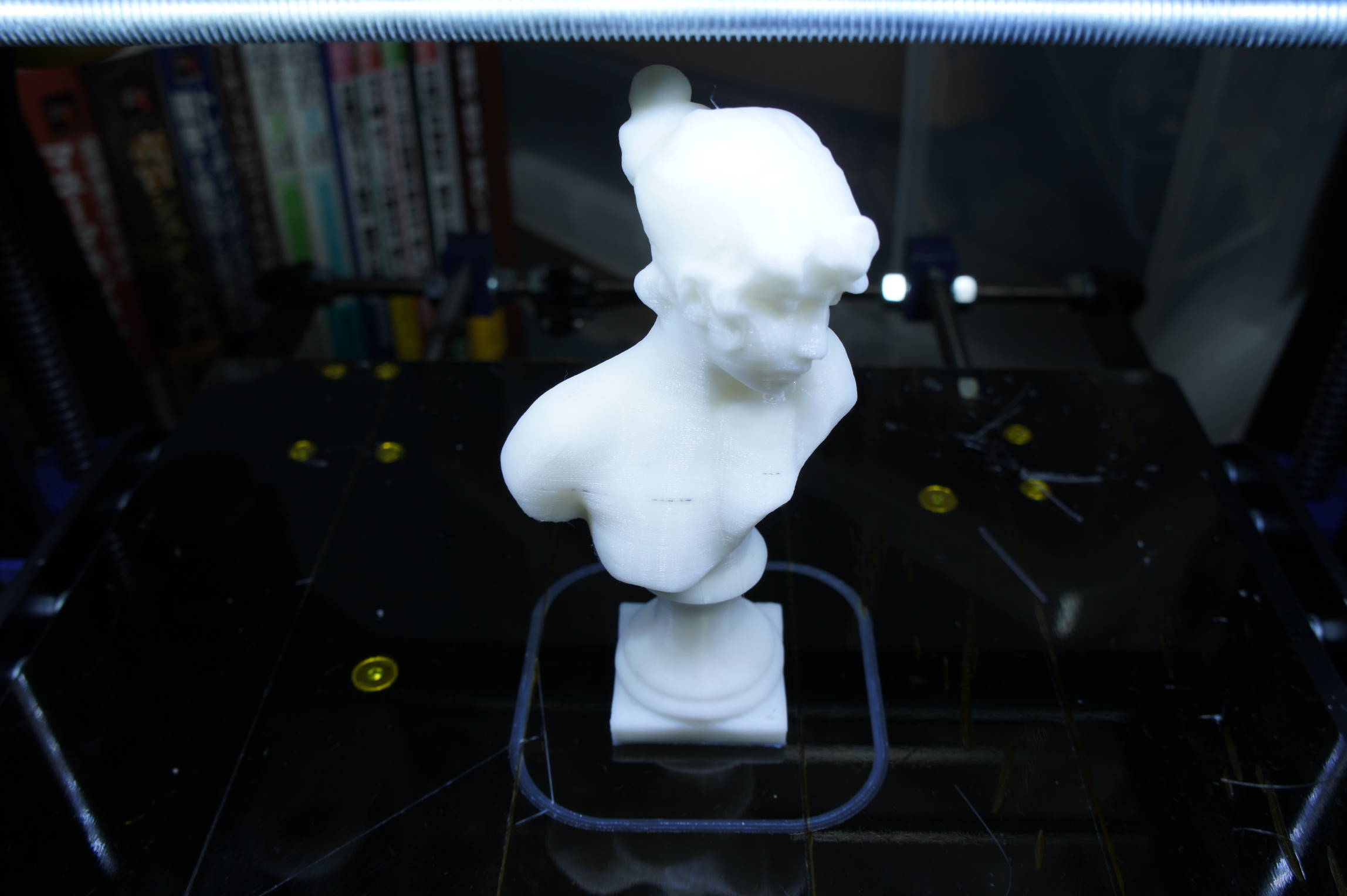
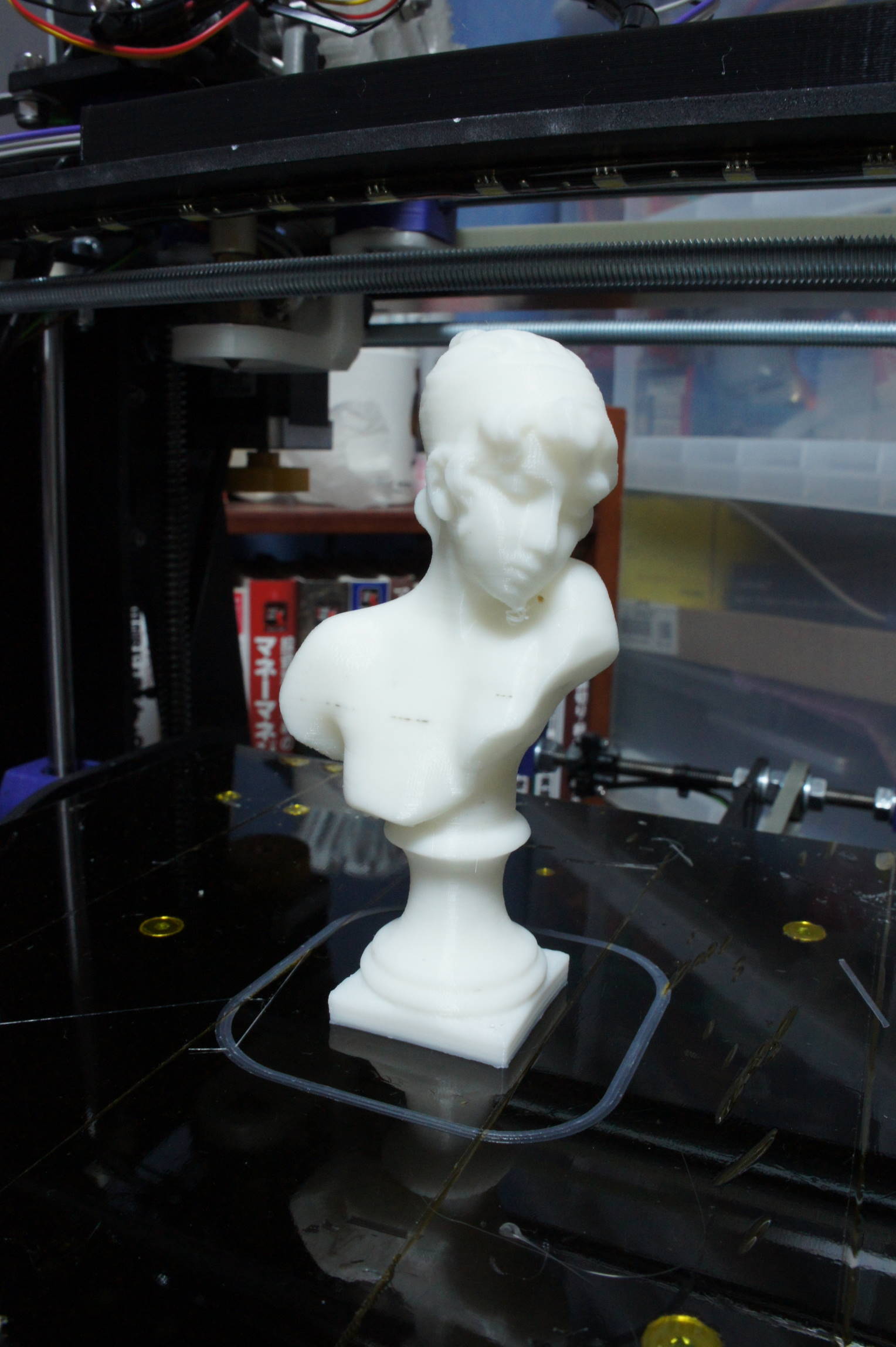
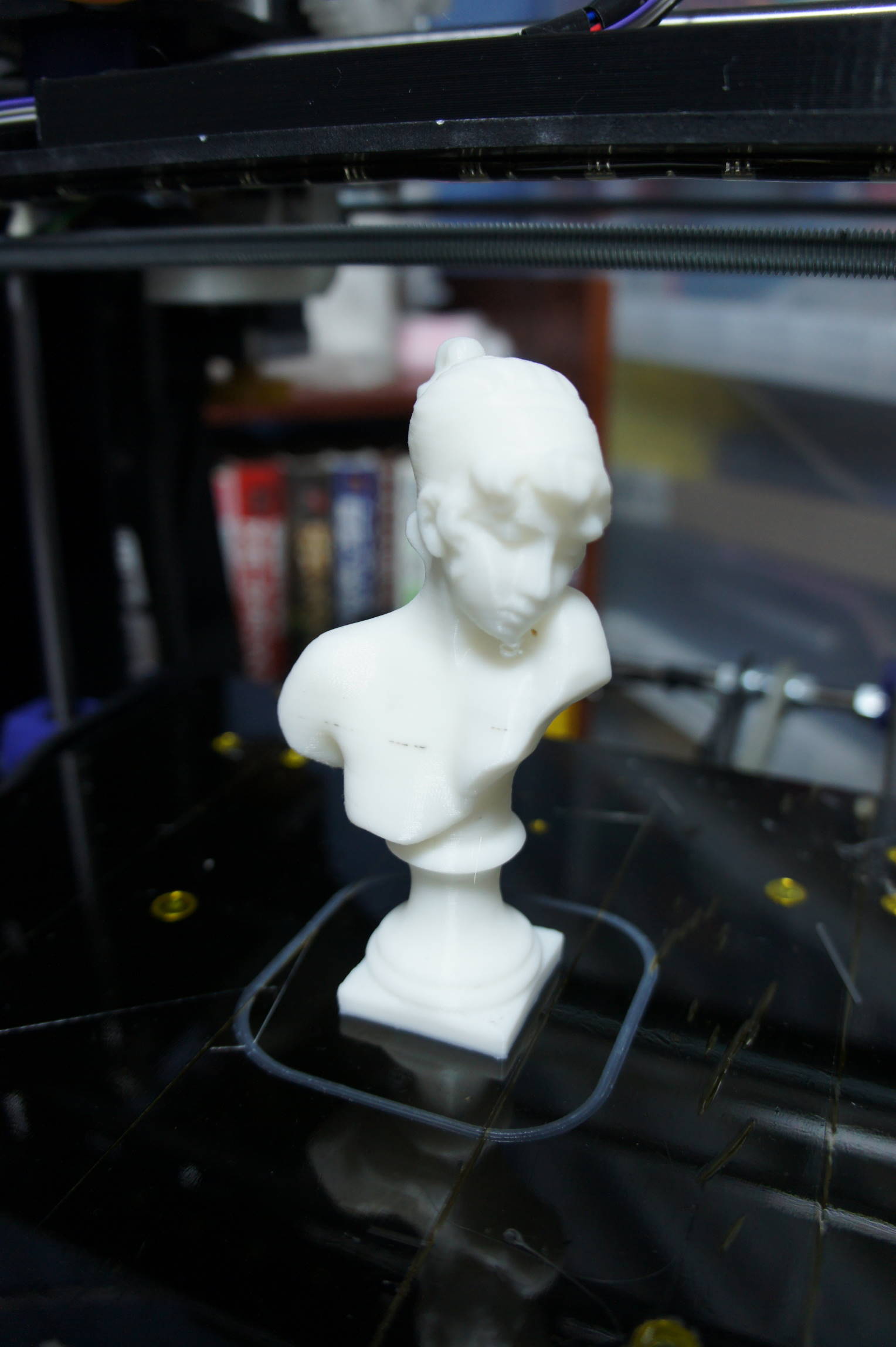
結果的には失敗というかうまくいかなかった場所は2箇所でした。
Orca 0.42で使っているStart/End時のカスタムG-code
Slic3rで使っているStart/EndのG-Codeを載せておきたいと思います。
スタート時にはホットエンドのフィラメントがもし垂れていたとしても大丈夫なように補充と言いますかをしてから開始するようにしています。
エンド時にはFANを回しっぱなしにして温度が低くなるまで待つようにしています。
Start G-Code
G28 ; home all axes
G92 E0 ;reset extruder
G1 E3 F400 ;Prime extruder 3mm
G1 E2 F400 ;retract extruder 1mm
G92 E0 ;reset extruderEnd G-Code
G1 X12.0 F4000 ; home (almost) x – stops extruder crashing into frame if at very top of Z height
G1 Y200.0 F4000 ; move the print to the front.
M104 S0 ; make sure the extuder is turned off.
M140 S0 ; make sure the bed is turned off.
M84 ; shut down motors.
M106 S255 ; FAN On(MAX)
M109 S40 ; Coolingdown Extruder
M104 S0 ;extruder init
M107 ; Fan Off
2012/09/24 20:36修正 ABSでのプリントを考えて修正しました。
Orca 0.42のMarlin設定値
0.42用の設定値はmendel-partsからダウンロードできるファームの設定値とはちょっと違うので自分で計算して入力してあげないといけません。 (Z軸がACMEになったので設定値が変わっています)
具体的には「Configuration.h」の”#define DEFAULT_AXIS_STEPS_PER_UNIT”がXYZ軸およびエクストルーダーで1mmを送る際に必要な設定値となります。
●参考までに現在使用中の設定値を記載します。
1/8ステップ(Generation 6 Electronics) #define DEFAULT_AXIS_STEPS_PER_UNIT {32.03, 32.03, 960, 142}
1/16ステップ(Arduino+RAMPS) #define DEFAULT_AXIS_STEPS_PER_UNIT {64, 64, 1920, 284}
実際は「Skeinforge Bridge Calibration Cube」などを印刷してみてX/Y/Z軸の設定値を微調整する必要があります。 (でも、タイミングベルトが適切になっていれば修正の必要は殆ど無いと思います)
Orca 0.42用のノズルクーリングファン
改良というか改造というかをしまくったホットエンド&エクストルーダーの調子が思いのほかいいのでダイレクトドライブ(PG35L-048)への換装はちょっと中断中です。
それよりも、射出したフィラメント冷却用のファンを何とかしたほうがいいのではないかと思いネット上の情報を組み合わせて作成してみました。

何に一番苦労したかと言いますと、取り付けるためのスペースが無いんですよ!!Orz

Orca 0.42完成でいいのかな…。
制御系を「Generation 6 Electronics」⇒「Arduino MEGA/RAMPS」に変更してステップモードを1/16に変更しました。
モーター音がかなり静かになりましたのでこの変更はかなりお勧めです。
本体への取り付け用の台座は初めて3D-CADソフトを使って自分で設計しました!
それから、ファームは上がったばかりの「Marlin_RC3」を入れてみました。設定情報は適当に計算して入力…。

ちなみに、エンドストップがそのままでは使えないので途中で変換用の基盤を作って変換しています。(もしかすると、ファーム側で吸収できたかもしれない…)

Information
ここの文章と上に表示されているタイトルは管理画面の、 「 monochromeオプション設定 」 から変更してください。
最近の投稿
アーカイブ
- 2024年6月
- 2024年5月
- 2024年4月
- 2019年7月
- 2019年5月
- 2019年4月
- 2018年8月
- 2018年6月
- 2018年5月
- 2018年2月
- 2017年8月
- 2017年6月
- 2017年5月
- 2017年4月
- 2017年3月
- 2017年2月
- 2017年1月
- 2016年12月
- 2016年11月
- 2016年10月
- 2016年9月
- 2016年8月
- 2016年7月
- 2016年6月
- 2016年5月
- 2016年3月
- 2016年2月
- 2016年1月
- 2015年12月
- 2015年11月
- 2015年8月
- 2015年7月
- 2015年6月
- 2015年5月
- 2015年4月
- 2015年3月
- 2015年2月
- 2015年1月
- 2014年12月
- 2014年11月
- 2014年10月
- 2014年9月
- 2014年8月
- 2014年7月
- 2014年6月
- 2014年5月
- 2014年4月
- 2014年3月
- 2014年2月
- 2014年1月
- 2013年12月
- 2013年11月
- 2013年10月
- 2013年9月
- 2013年8月
- 2013年7月
- 2013年6月
- 2013年5月
- 2013年4月
- 2013年3月
- 2013年2月
- 2013年1月
- 2012年12月
- 2012年11月
- 2012年10月
- 2012年9月
- 2012年8月
- 2012年7月
- 2012年6月
- 2012年5月
- 2012年4月
- 2012年3月
- 2011年6月
- 2011年5月
- 2010年7月
- 2010年6月
- 2010年1月
- 2008年11月
- 2007年4月
- 2007年1月
- 2006年11月
- 2006年9月
- 2006年8月
- 2006年7月
- 2006年6月
- 2006年5月
- 2006年4月
- 2006年3月
- 2006年2月
- 2006年1月