FF-LED_Boardの本番ボード設計(その1)
だいたいテストが終了したので本番用のボード設計を行いました。バッテリ駆動できる様に電源部分を大幅変更した結果、部品配置パズルをやる直す羽目になってしまい大変苦労しました。それにしても電源周りのチップとかパーツは高いですね。小型の表面実装でなければそれほどしないのですが小型の物はやはり高いです。
とりあえず、本番用の基板と言うことでFusionPCBに注文予定です。出来てくるのは2週間後かな。PLCC4のLEDの入手とかどうしようかな…。
カテゴリー : 電子工作
だいたいテストが終了したので本番用のボード設計を行いました。バッテリ駆動できる様に電源部分を大幅変更した結果、部品配置パズルをやる直す羽目になってしまい大変苦労しました。それにしても電源周りのチップとかパーツは高いですね。小型の表面実装でなければそれほどしないのですが小型の物はやはり高いです。



とりあえず、本番用の基板と言うことでFusionPCBに注文予定です。出来てくるのは2週間後かな。PLCC4のLEDの入手とかどうしようかな…。
申し込んであったのですが、出店承認メールが来ておりました。作っているFF-LED_Board&iDunio2/3とかを当日配布予定でございます。あとMQCXは当日までに何とか初回のフライトは成功させて実機を持って行きたいと思います。
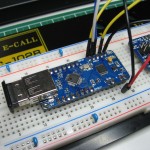
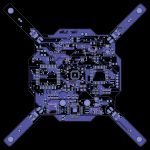
Fusion PCBで作った4層基板が上がってきましたので部品の実装をしていました。現状で電源系とLED点灯系の実装とテストが終わっています。I2C系がまだ未テストです(RTC含む)。
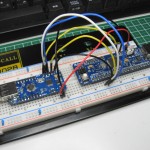
■実装中の基板

■1mm/Ah = 39-40mil(1mil=0.0254mm)
※:上記より、1mil=25mAh程度の電流量
■ドリル径
★単位
1in=2.54cm
前回、設計した基盤が出来上がってきました。現状で使う予定ないのですが、とりあえず作って見た感じですね。簡単にAVRとの接続検証だけ終わらせました。回路とかいま思うと簡単なのですがここにたどり着くのにずいぶん時間がかかったなと思いますね。Eagleの扱いとかの問題とかも含んでいたので余計にややこしくなってしまったのですがもう思い出ですよ。
えーと、順調に遅れました…。先週頭に注文している予定だったのですが、部品配置と配線が終わらず結局一週間遅れです。
言い訳としては、10cm四方を5cm四方に入れるのは面積で4分の1になってしまいかなり大変である…。大変なんですよ~。回路変更した時の動作確認しながらだったので余計に時間がかかりました。
今回はなんだかんだで満足行く仕上がりになりました。現状で考えていた全部の機能を一枚の基板に入れることに成功しました。(以前はサブボード扱いにして載せ替え考えてました)
外部出力端子関係が若干オミットされてしまいましたがその辺りはおいおい考えながら追加していきたいと思います。重量かどのぐらいになるかな?
■回路構成

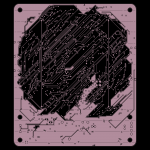
■配線イメージ
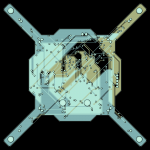
よく見ると、4層にしなくても良かったかもしれないと思われるぐらい中間層の配線が少ないことに気がつきました。もしかしたら2層でもいけるかもしれないので次回チャレンジしてみます。
作りなおしていました、Sanguino互換ボード「iDunio3」のVer2が出来上がってきました。チェックするときにはちゃんとレジスト面のチェックをしなければならないという教訓を学びました。
■比較(上がVer1、下がVer2)

※:USB-A/Mini-Bの両対応になって、RTS/CTS端子が追加されました。
Foldarapを作成する際に修正してプリントしたパーツのデータを追加で公開します。本家は5mmシャフトになっているのですが、6mmシャフトで色々といじっていたので5mmに乗り遅れてしまいました。データ修正が面倒でとりあえず6mm仕様としていますが、プリントに問題がないので修正予定はありません。
以前から公開している以下のデータと組み合わせるとこのBlogで作った機体と同じ物が作成できる、はずです。
作り方で不明な点があればご連絡いただければ質問に答えます。
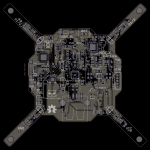
とりあえずですが、テスト機のサイズを決定しました。イメージ図をCADで出しながらできるだけ基板面積が広く取れるように色々と調整してみました。結果、以前考えていた単純な四角形から八画形に変更したことで面積が増えました。以前の四角形で古い回路(部品点数多い)で部品実装可能だったので今回はMPU用のI2C変換+MPU6050とTLCのLED制御部分も搭載する方向で設計していきたいと思います。
■機体イメージ
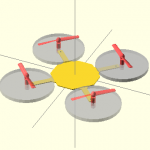
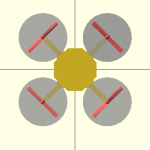
※:イメージの灰色部分はローター回転部分(110%)
試作3世代目の基板が上がって来ましたので実装しました。なんとか、ほぼすべての機能のテストと回路修正が終わりました(LED周りは面倒なので今回は実装せず)
■届いた基板(小さい方がAVR+MAXだけの基板で実装済み)
