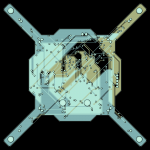
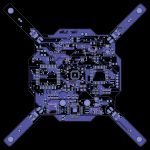
FF-LED_Boardの本番ボード設計(その2)
データアップしたら、ペンディング来ました…。試作基板と同じデザインルールなのに内層は8milだそうです。Eagle使っているんですが1/16は6milで2/15は8milのオートルートとか出来ないと思うんですけど。と言うことは全部8milで引き直しとかになるんですがそうなるとほぼ全部やり直しになってしまいます。いままで良かったのに、今回はだめらしい…。だめならだめって最初から言えばいいのに、下手すると収まりきらないで作れない可能性が出てきました。最悪PCBCARTで作れるんですけど、単価が、単価が…。Orz
どこまで行けるか複数種類作ってぎりぎりを狙う方向で行きましょう。再配置に1週間かかるな…。