Arduino(Sanguino)互換ボード(その5)
作りなおしていました、Sanguino互換ボード「iDunio3」のVer2が出来上がってきました。チェックするときにはちゃんとレジスト面のチェックをしなければならないという教訓を学びました。
■比較(上がVer1、下がVer2)

※:USB-A/Mini-Bの両対応になって、RTS/CTS端子が追加されました。
カテゴリー : 電子工作
作りなおしていました、Sanguino互換ボード「iDunio3」のVer2が出来上がってきました。チェックするときにはちゃんとレジスト面のチェックをしなければならないという教訓を学びました。
■比較(上がVer1、下がVer2)
※:USB-A/Mini-Bの両対応になって、RTS/CTS端子が追加されました。
Foldarapを作成する際に修正してプリントしたパーツのデータを追加で公開します。本家は5mmシャフトになっているのですが、6mmシャフトで色々といじっていたので5mmに乗り遅れてしまいました。データ修正が面倒でとりあえず6mm仕様としていますが、プリントに問題がないので修正予定はありません。
以前から公開している以下のデータと組み合わせるとこのBlogで作った機体と同じ物が作成できる、はずです。
作り方で不明な点があればご連絡いただければ質問に答えます。
とりあえずですが、テスト機のサイズを決定しました。イメージ図をCADで出しながらできるだけ基板面積が広く取れるように色々と調整してみました。結果、以前考えていた単純な四角形から八画形に変更したことで面積が増えました。以前の四角形で古い回路(部品点数多い)で部品実装可能だったので今回はMPU用のI2C変換+MPU6050とTLCのLED制御部分も搭載する方向で設計していきたいと思います。
■機体イメージ
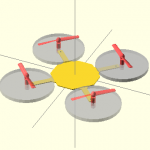
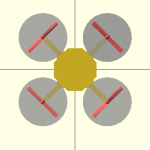
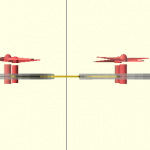
※:イメージの灰色部分はローター回転部分(110%)
試作3世代目の基板が上がって来ましたので実装しました。なんとか、ほぼすべての機能のテストと回路修正が終わりました(LED周りは面倒なので今回は実装せず)
■届いた基板(小さい方がAVR+MAXだけの基板で実装済み)

チップ部品、最近これのハンダ付が多いと言うかこればかりです。抵抗とかコンデンサとかは普通のコテ先でも付くのですが問題はQFPパッケージ以下のなんかの足が出て居ない部品。
リフローの成功率とあいまって、0.5mmピッチのICなんかは手で付けています。それでも、一発目の成功率がよろしくなかったのですがコテ先変えたらかなり良い感じに付くようになったのでメモです。
そのコテ先がT18-BR02 0.2BR型です。

J型と言う、らしいのですがT18系には無かったのですが出たみたいです。
最近結構遊んでいるというか遊ばれているMAX3421Eをブレッドボードに直刺し出来る様な形のボードにしてみました。(一部LEDの省略、ロジックレベル変換部分はオリジナルになります)MQCX用のテスト用に機能分離した物の修正版になります。3.3V用の電源回路も搭載したので便利に使えるかな。

次の基板注文の際についで注文予定です。
えーと、ボードのデータの差し戻しを2回ほど食らっております…。Eagle上では問題ないんですけどどうやらあちらの方では問題がある様です。表面実装のタクトスイッチを使ってみたのですが、パッド無いに位置合わせ用の穴があるタイプなのですがそれがどうやらEagleでうまく作れていないのが原因のようです。

色々とやってみたのですがどうもうまくAutoRouterが動いてくれない模様なのでパーツ自体を変更することにしました。

さて、エラーは出ない状態なのですがどうなるでしょう。
出力ピンの少ないマイコンから大量のLEDを駆動しようとするとピン数を増加させるためにシフトレジスタや専用ICなどを使わないといけません。
そのための回路としていくつかの種類がありますので記載しておこうと思います。
74HC595+ソースドライバ(TD62783AFNG)-ソース側
74HC595+シンクドライバ(TD62083AFNG)-ソース側
LEDで遊んでいるというか息抜きをしているのでわかりやすく情報を整理しておきたいと思います。
LEDというか回路全てに言えることですが負荷に対してどちら側に制御用の素子を入れるかによって回路の形が変わってしまいます。よく使うのは下の図でいうところの「シンクドライブ回路」になります。

図にしてみるとわかりやすいですね。LEDマトリクスを駆動する際には上記の2つの回路を両方共に使用してどちらかを行とどちらかを列と指定してLEDを点灯させることになります。
